1.2 La ligne
A - L'entraînement du câble
Pour mettre en mouvement les véhicules, il convient de mettre en mouvement le(s) câble(s) entraînant ces derniers. Un moteur est un élément qui permet dans le cas des remontées mécaniques de transformer de l'énergie électrique en énergie de mouvement afin de faire tourner une poulie et entraîner ainsi un câble.
Qu'est-ce qu'un moteur ?
Un moteur est un dispositif permettant de convertir de l'énergie électrique en énergie mécanique Il est caractérisé par ses besoins énergétiques (nature de l'alimentation, consommation énergétique) et par ses spécifications mécaniques (couple, fréquence de rotation, vitesse, ...).
Le but est de créer un champ magnétique attirant successivement la borne positive du rotor vers le pôle nord du stator et inversement. Ainsi, le rotor se met en mouvement et il y a création d'énergie mécanique.
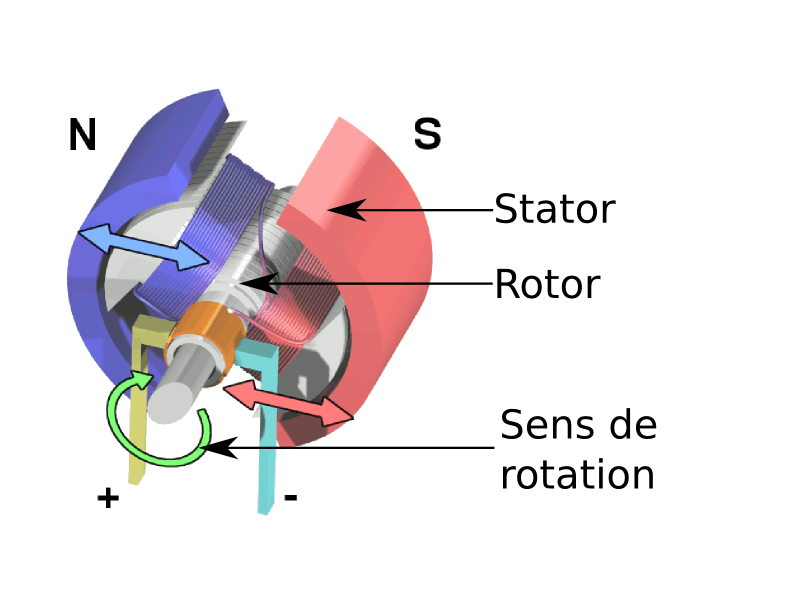
Document http://upload.wikimedia.org/wikipedia/commons/e/e6/Electric_motor_cycle_1.png adapté par les auteurs du TPE.
{kind=link}
Estimation de la puissance nécessaire d'un moteur
Le choix du moteur dépend de plusieurs paramètres regroupés dans la forumle suivante qui permet de déterminer la puissance nécessaire du moteur d'un téléphérique pour mettre en mouvement les véhicules :
\(P=\frac{(M_{montant}-M_{descendant}) \times g \times H_{dénivelé}}{\Delta T_{m}}\) avec :
- \( P \) : La puissance nécessaire au moteur pour mettre en mouvement les véhicules en W.
- \( M_{montant} = \frac{N_{sièges}(M_{siège}+N_{passagers \ par \ véhicule} \times M_{passager}) }{2} \) : La masse totale des véhicules en charge sur le brin montée avec le nombre maximal de personnes en omettant le câble. On prend en général \(M_{passager}=80 \ kg\).
- \(M_{descendant} = \frac{N_{sièges}(M_{siège}+N_{passagers \ par \ véhicule} \times M_{passager}) }{2}\) : La masse totale des véhicules en charge sur le brin descendant avec le nombre maximal de personnes en omettant le câble. On prend en général \(M_{passager}=80 \ kg\).
- \( g=9,81 \ m \circ s^{-2}\) (aussi noté \( 9,81 \ N \circ kg^{-1}\)) : Intensité de la pesanteur, c'est-à-dire du champ attractif qui s'exercie sur un objet d'un astre. Sur la Terre, cette valeur vaut \( 9,81 \ m \circ s^{-2}\).
- \(H_{dénivelé}=H_{a}-H_{d}\) : Différence positive d'altitude entre les deux gares en mètres.
- \(\Delta T_{m} = \frac{d}{V}\) : Temps de montée entre la gare aval et la gare amont en s.
Exemple :
Partons du télésiège fixe du Glacier installé à l'Alpe d'Huez en 2001 par Pomagalski. Nous savons que ce télésiège a une gare aval à \(H_{départ}=2932 \ m\) et une gare amont à \(H_{arrivée}=3300 \ m\). On sait également que la vitesse nominale de translation du câble est de \( v=2,3 \ m \circ s^{-1}\), et la longueur de la montée \(d=960 \ m\).
Notons que l'appareil n'est pas exploité aux passagers à la descente.
Calcul du temps de montée \(\Delta T_{m}\) :
\(\Delta T_{m}= \frac{d}{V}\)
Application numérique :
\(\Delta T_{m} = \frac{960}{2,30}\)
\(\Delta T_{m} = 417 \ s\)
Le temps de montée du télésiège du Glacier à l'Alpe d'Huez est de l'ordre de 6 minutes 57 secondes.
B - La tension des câbles
Une fois les câbles tirés entre les deux points à relier par téléphérique, une dernière étape reste importante : la tension. Celle-ci est essentielle et permet de compenser l'effort des véhicules sur le câble ainsi que de compenser l'allongement du câble. Pour ce faire, deux technologies prédominent : le contrepoids, et une technique plus précise et récente : le vérin hydraulique.
Le contrepoids
Technologie simpliste par nature, le contrepoids a permis rapidement dans l’histoire des remontées mécaniques de tendre les câbles facilement et simplement. Il consiste à fixer à une poulie retour d'un téléphérique un bloc de béton que l'on suspend afin de tirer et tendre. Sur la majorité des appareils, la poulie tension est maintenue sur un chariot qui peut se déplacer d'avant en arrière, que l'on appelle lorry de tension.
Pour augmenter la force de tension avec un même contrepoids, les ingénieurs ont misé sur un système de démultiplication des forces à l'aide de plusieurs poulies : le câble qui relie le contrepoids à la poulie est ancré sur le contrepoids et forme une boucle sur la poulie de tension de l'installation.
Ce système a néanmoins l'inconvénient majeur de ne pas tendre précisément le câble de l'installation, même s'il reste simple et facile de maintenance. Un autre système a donc été utilisé : le vérin hydraulique.

Photo personnelle.
Le vérin de tension
Le vérin hydraulique est un cylindre dans lequel est insérée une longue tige, le piston. Entre la tête du piston et la fin du vérin, on trouve une chambre dans laquelle on injecte plus ou moins de liquide pour repousser ou attirer le piston et ainsi mettre en mouvement cette tige. Afin qu'il n'y ait aucune fuite entre la chambre et le reste du vérin, des joints très résistants sont installés. Ils sont très importants, puisqu'un vérin perd toute son efficacité lorsqu'il n'est plus étanche. Ces joints sont donc les garants de la longévité de ces outils de la tension du câble. Aussi, un groupe de compression permet de mettre sous pression le fluide dans le vérin.
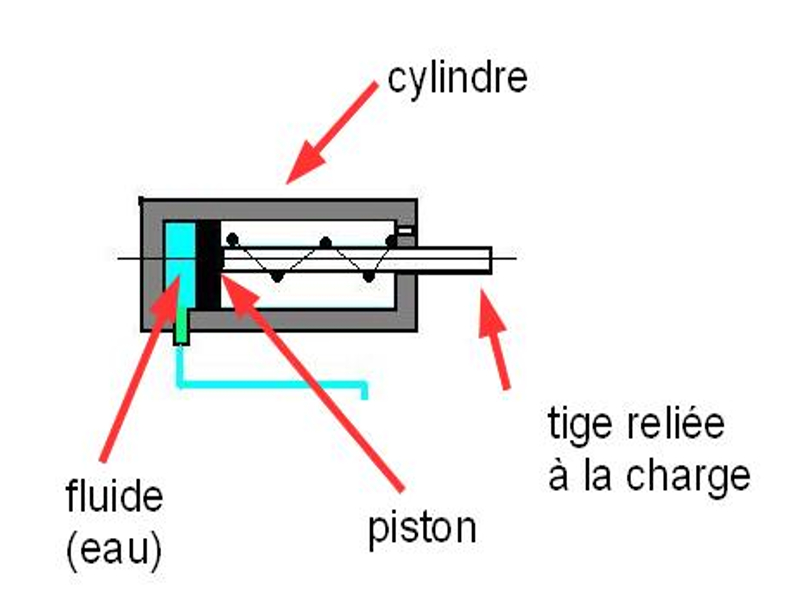
http://python.espe-bretagne.fr/blog-bruno-rohou/wp-content/uploads/vérin-hydraulique.jpg (lien supprimé après rédaction du dossier).
On peut ensuite déterminer par les formules physiques habituelles la force déployée par le vérin hydraulique avec \(F = P \times S \) :
- \( F \) : Force du vérin en newtons.
- \( P \) : Pression du fluide de la chambre du vérin en pascals.
- \( S \) : Surface d'application de la pression, exprimée en mètres carrés telle que \( S = \pi \times R^{2} \).

Photo personnelle.
C'est justement cette centrale de tension qui permet via un pupitre dédié de gérer la tension plus précisément (au newton près) que le contrepoids, qui permet une tension visuelle plus ou moins correcte.
C - Les pylônes
Pour franchir des obstacles, et lorsque de nombreux véhicules sont en ligne (on exclut ici les téléphériques à va-et-vient), les pylônes deviennent indispensables. En effet, la flèche, force appliquée par les véhicules sur le câble peut devenir trop importante : il faut alors de quoi soutenir le câble. Le but étant que la flèche ne soit pas trop important entre deux pylônes, sans que la portée entre ces deux derniers ne soit trop importante afin de ne pas multiplier le nombre de ces ouvrages de ligne. Ces pylônes sont composés d'un fût (le tube de maintien) ou une structure en treillis, et la tête de pylône qui soutient les balanciers, ensembles de galets de part-et-d ‘autre de l'ouvrage de ligne.
Intéressons-nous donc aux différents types de pylônes :
Le pylône support
Supporte le câble et le maintien au-dessus du niveau du sol. Il peut parfois permettre de diminuer la pente du câble, notamment à l'arrivée en gare.

Photo personnelle.
Le pylône compression
Le pylône compression permet d'augmenter sensiblement la pente du câble et s'adapter à une brusque rupture de pente. Il tire le câble vers le bas, et permet d'éviter les hauteurs de survol trop importantes et maintient la tension du câble.
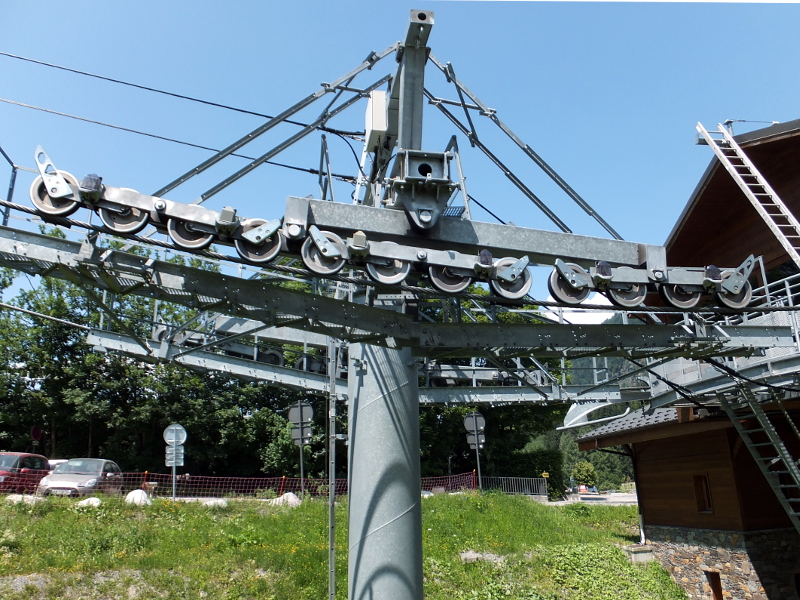
Photo personnelle.
Le pylône support-compression
Le pylône support-compression est mélange des deux types de pylônes décrits précédemment, ils sont utilisés lorsque le pylône compression ou support n'est pas assez pertinent. On les utilise lorsque la pente de la ligne est constante ou qu'elle va augmenter légèrement. Ils permettent d'éviter d'installer plusieurs pylônes compression et support.

Photo personnelle.
Pour comprendre l'implantation des pylônes, il faut en revenir aux forces en Physique. Les balanciers des pylônes n'étant pas droits mais courbes et les câbles étant flexibles, le tracé de la ligne n'est pas droit mais courbe à la manière d'une parabole type polynôme du second degré décroissante puis croissante (de la forme \(y = ax^2 + bx + c\) avec \(a \in \mathbb{R} \) et \(a > 0 \) ). Le logiciel GHTyro nous permet ainsi d'étudier la position du câble en fonction de l'avancée d'une cabine.
Nous avons donc vu que les téléphériques, quels qu'ils soient, ont besoin pour fonctionner d'un câble mis en mouvement et tendu, ainsi que de véhicules, accouplés au câble soit par une pince fixe, soit par une pince débrayable. Ces câbles sont soit porteurs-tracteurs, soit assurent uniquement la fonction de porter, soit uniquement la fonction de tracter.
Le câble tracteur est mis en mouvement par un moteur électrique, dont la puissance doit
prendre en compte la masse des véhicules et leur chargement, ainsi que la topographie (en général on se base sur le dénivelé pur). Et pour maintenir le câble au-dessus du sol, on utilise des dispositifs tels que les contrepoids ou plus récemment les vérins hydrauliques, plus précis pour une tension adéquate.
Sur la plupart des téléphériques, on retrouve également des pylônes pour s'affranchir des contraintes de topographie, parmi lesquels les pylônes compression, support-compression et support.